


Introducere în materialul PEEKSenzori robotici
PEEK (polietere eter cetonă) este un plastic ingineresc special de înaltă performanță, cu proprietăți precum rezistență ridicată la temperaturi (temperatură de funcționare pe termen lung în jur de 240°C), rezistență la coroziune chimică, rezistență ridicată, greutate redusă, coeficient de frecare redus și izolație electrică excelentă. Aceste avantaje îl fac un material ideal pentru componentele cheie ale senzorilor roboți, abordând deficiențele senzorilor tradiționali din metal sau plastic obișnuit în ceea ce privește precizia, stabilitatea și adaptabilitatea la mediu.
I. Tipuri și caracteristici ale aplicațiilor principale
Materialul PEEK funcționează în principal prin fabricarea componentelor structurale de bază sau a substraturilor funcționale ale senzorilor. Tipurile comune de aplicații sunt următoarele:
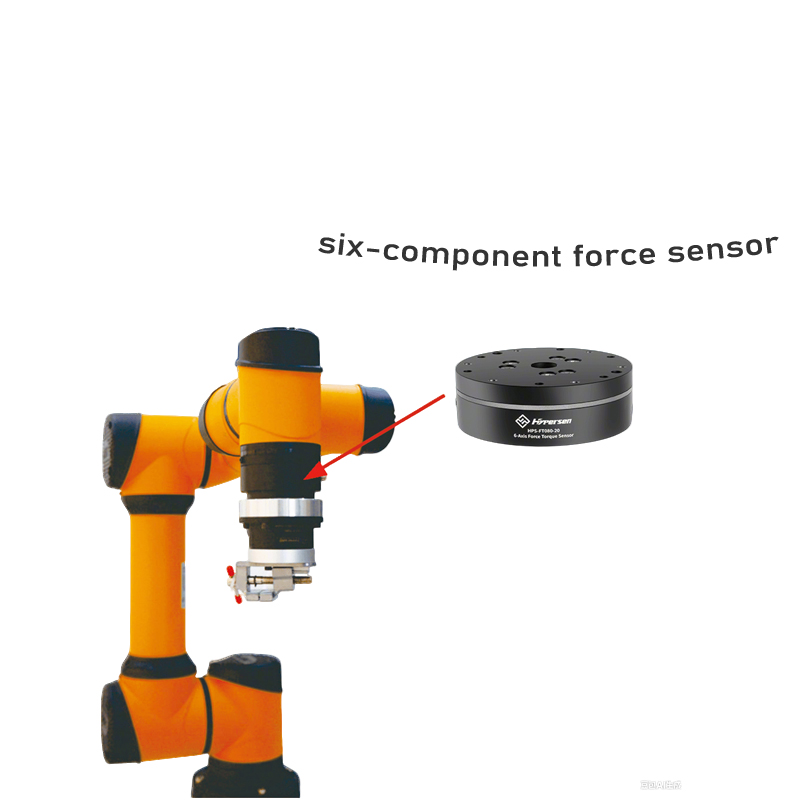
1. Senzori de forță/cuplu șase-dimensionali
Partea de aplicație: Corpul helastic (componenta principală pentru percepția semnalului de forță) al senzorului.
Valoare fundamentală: Corpurile elastice tradiționale sunt fabricate în mare parte din aliaj de aluminiu, în timp ce PEEK are un raport mai bun între modulul de elasticitate și densitate - asigurând rezistența structurală, reducând în același timp semnificativ masa corpului elastic, minimizând interferențele inerțiale în timpul mișcării robotului și îmbunătățind precizia măsurării forței (până la ±0,1% din valoarea totală a solului) și viteza de răspuns dinamic (timpul de răspuns < 1 ms).
Scenarii tipice: asamblarea roboților industriali (cum ar fi controlul precis al forței de strângere a șuruburilor), interacțiunea colaborativă om-mașină a robotului (cum ar fi percepția forței de coliziune), feedback-ul forței chirurgicale al roboților medicali (cum ar fi monitorizarea forței de șlefuire a suprafeței osoase în roboții ortopedici).

2. Senzori tactili/de deformare
Piesă de aplicație: Substratul flexibil sau purtătorul de electrod al senzorului.
Valoare fundamentală: PEEK are o anumită flexibilitate și rezistență la oboseală, permițându-i să fie procesat în forme subțiri sau neregulate, potrivite pentru scenarii de contact curbate sau flexibile, cum ar fi degetele robotului și cleștii; în același timp, izolația sa electrică poate preveni interferențele semnalului, asigurând stabilitatea datelor tactile (cum ar fi presiunea, recunoașterea texturii) sau a tensiunii (cum ar fi deformarea articulațiilor).
Scenarii tipice: Percepția presiunii în roboții de service la apucarea obiectelor fragile (cum ar fi sticlă, fructe), monitorizarea tensiunii pentru potrivirea în ansamblul flexibil al robotului industrial.
3. Senzori specializați pentru medii corozive
Piesă de aplicație: Carcasa, manșonul de protecție al sondei sau componentele de contact ale senzorului.
Valoare fundamentală: PEEK are o rezistență extrem de puternică la acizi, alcali, solvenți organici și abur la temperatură înaltă (cum ar fi curățarea CIP în industria alimentară), mult superioară oțelului inoxidabil sau materialelor plastice obișnuite, protejând componentele interne ale senzorului de coroziune și prelungindu-i durata de viață.
Scenarii tipice: Senzori de nivel/concentrație de lichid în roboți alimentari/medicali (cum ar fi monitorizarea nivelului de lichid în rezervoarele de sos), senzori de parametri de mediu în roboți chimici (cum ar fi protejarea sondelor de detectare a gazelor corozive).
II. Avantaje principale față de materialele tradiționale

III. Domenii tipice de aplicare
Roboți industriali: Controlul forței de asamblare, feedback-ul forței de șlefuire, monitorizarea presiunii de prindere;
Roboți medicali: Percepția forței instrumentelor chirurgicale (cum ar fi feedback-ul de forță în operațiile laparoscopice), monitorizarea tensiunii articulare a roboților de reabilitare;
Roboți speciali: Senzori de mediu rezistenți la coroziune în domenii alimentare/chimice, senzori de temperatură/forță în condiții de temperatură ridicată (cum ar fi sudarea în industria auto).









